2.2.4.8. ukf module¶
- class ukf.UKF(dt: float = 0.01, update_strategy: UpdateStrategy = UpdateStrategy.ALL_STATES, sigma_alpha: float = 0.1, minimal_cone_covariance_area: float = 0.15, u_dim: int | None = None, u_array: ndarray[Any, dtype[ScalarType]] | None = None, t_array: ndarray[Any, dtype[ScalarType]] | None = None, name: str = 'ukf', P: List[float] = [0.1, 0.1, 0.2, 3], template_Q: List[float] = [1, 1, 5, 15], perceived_n_threshold: int = 1, steering_model: dict | None = None, steering_wheel_to_ackermann_lut: interp1d | None = None)[source]¶
Bases:
UnscentedKalmanFilterUnscented Kalman Filter class which inherits from the UKF implementation in filterpy.
Filter used to combine control inputs from the steering wheel and measurements from the IMU, the wheel speed sensors and the GPS. The goal is to approximate the driven track of our car as accurately as possible. The control inputs are used to predict the next state vector which is then updated using the measurements from the sensors.
- x¶
State vector of x, y, v_x, psi.
- Type:
npt.NDArray
- u¶
Control input at one timestamp.
- Type:
npt.NDArray
- ros_u¶
Variable to prevent u from being overwritten during ROS callbacks.
- Type:
npt.NDArray
- u_array¶
Control inputs at all timestamps.
- Type:
npt.NDArray
- t_array¶
Timestamps where measurements or control inputs exist.
- Type:
npt.NDArray
- sensors¶
The sensors used for the update step. They hold the measurements z, covariances R and the transformation function Hx.
- Type:
List[Sensor]
- predict_tolerance¶
Time in which the same prediction can be used. If exceeded, a new prediction is necessary.
- Type:
- P¶
State covariance matrix. Holds the covariances of all components of x.
- Type:
npt.NDArray
- Q¶
Process covariance matrix.
- Type:
npt.NDArray
- fake_landmark_ids¶
List of ids of tracked landmarks to send out. Used to fake ids for skidpad cones for planning.
- Type:
List[float]
- landmark_perceived_n¶
List of how often this specifc landmark has already been perceived.
- Type:
List[int]
- mapping¶
Mapping / association between the current observed landmarks and all tracked landmarks.
- Type:
List[npt.NDArray]
- local_mapping_updates¶
List of all time steps the kalman filter has been updated with the local mapping.
- Type:
List[int]
- local_mapping_compared_associations_n¶
Number of finally compared best associations object during data association.
- Type:
- individual_compatability¶
Individual compatibility between the observed and observable landmarks of the last local mapping update.
- Type:
Optional[npt.NDArray]
- observable_to_global_mapping¶
Mapping between the observable and all tracked landmarks of the last local mapping update.
- Type:
Optional[npt.NDArray]
- update_strategy¶
Update strategy to use during the update step.
- Type:
- initial_world_heading¶
Vehicle heading in world frame during first measurement.
- Type:
Optional[float]
- initial_map_heading¶
Vehicle heading in map frame during first vehicle heading in world frame measurement.
- Type:
Optional[float]
- executed_steps¶
String representation of executed steps (predict, update for sensors) for this step.
- Type:
List[str]
- template_Q¶
Template for robot pose process noise Q which only needs to be multiplied by dt for current predict step.
- Type:
npt.NDArray
- max_decimals¶
Maximum number of decimal places behind the comma for the state noise matrix.
- Type:
- observed_landmarks¶
Currently observed landmark relative to vehicle pose.
- Type:
npt.NDArray
- observable_landmarks¶
Currently observable landmarks relative to vehicle pose.
- Type:
npt.NDArray
- observable_state_covariance¶
Covariance of currently observable landmark.
- Type:
npt.NDArray
- perceived_n_threshold¶
How many times the landmark should been perceived to not be discarded during map clean up.
- Type:
- steering_wheel_to_ackermann_lut¶
Look up table to convert steering wheel angle (degrees) to ackermann angle (degrees).
Initialization function.
- Parameters:
dt (float, optional) – Time in which the same prediction can be used. If exceeded, a new prediction is necessary, by default 0.01
update_strategy (UpdateStrategy, optional) – Update strategy to use during the update step, by default UpdateStrategy.ALL_STATES
u_dim (int, optional) – Dimension of control inputs, by default None
u_array (npt.NDArray, optional) – Control inputs at all timestamps, by default None
t_array (npt.NDArray, optional) – Timestamps where measurements or control inputs exist, by default None
P (List[float], Optional) – State covariance matrix. Holds the covariances of all components of x.
template_Q (List[float], optional) – Template for robot pose process noise Q which only needs to be multiplied by dt for current predict step.
perceived_n_threshold (int, optional) – How many times the landmark should been perceived to not be discarded during map clean up.
- property P_R: ndarray[Any, dtype[ScalarType]]¶
Returns state noise covariance matrix of the robot pose state vector.
- Returns:
State noise covariance matrix of the robot pose state vector.
- Return type:
npt.NDArray
- property P_R_post: ndarray[Any, dtype[ScalarType]]¶
Returns posterior of the state noise covariance matrix of the robot pose state vector.
- Returns:
Post of the state noise covariance matrix of the robot pose state vector.
- Return type:
npt.NDArray
- property P_R_prior: ndarray[Any, dtype[ScalarType]]¶
Returns prior of the state noise covariance matrix of the robot pose state vector.
- Returns:
Prior of the state noise covariance matrix of the robot pose state vector.
- Return type:
npt.NDArray
- property P_necessary: ndarray[Any, dtype[ScalarType]]¶
Returns the necessary state noises for the prediction and update based on self.x_indices_to_update.
- Returns:
Necessary state noises for the prediction and update based on self.x_indices_to_update.
- Return type:
npt.NDArray
- add_sensor(sensor_obj: Sensor) Sensor[source]¶
Add a new sensor object to the filter.
Possible options for sensor classes are defined in the sensors folder.
- calculate_Q(dt: float, x_dim: int) None[source]¶
Calculate state transition noise covariance matrix Q based on the current dt.
- compute_process_sigmas(dt, fx=None, **fx_args)[source]¶
computes the values of sigmas_f. Normally a user would not call this, but it is useful if you need to call update more than once between calls to predict (to update for multiple simultaneous measurements), so the sigmas correctly reflect the updated state x, P.
- copy(x: ndarray[Any, dtype[ScalarType]], P: ndarray[Any, dtype[ScalarType]], timestamp: float, name: str = 'default') UKF[source]¶
- cross_variance(x, z, sigmas_f, sigmas_h)[source]¶
Compute cross variance of the state x and measurement z.
- static f_x(sigma_points: ndarray[Any, dtype[ScalarType]], dt: int, u: ndarray[Any, dtype[ScalarType]], steering_wheel_to_ackermann_lut) ndarray[Any, dtype[ScalarType]][source]¶
Calculate the predicted next state based on the current state x,the timestep t and the control input u.
Using a simple bicycle model that disregards any side slip angle.
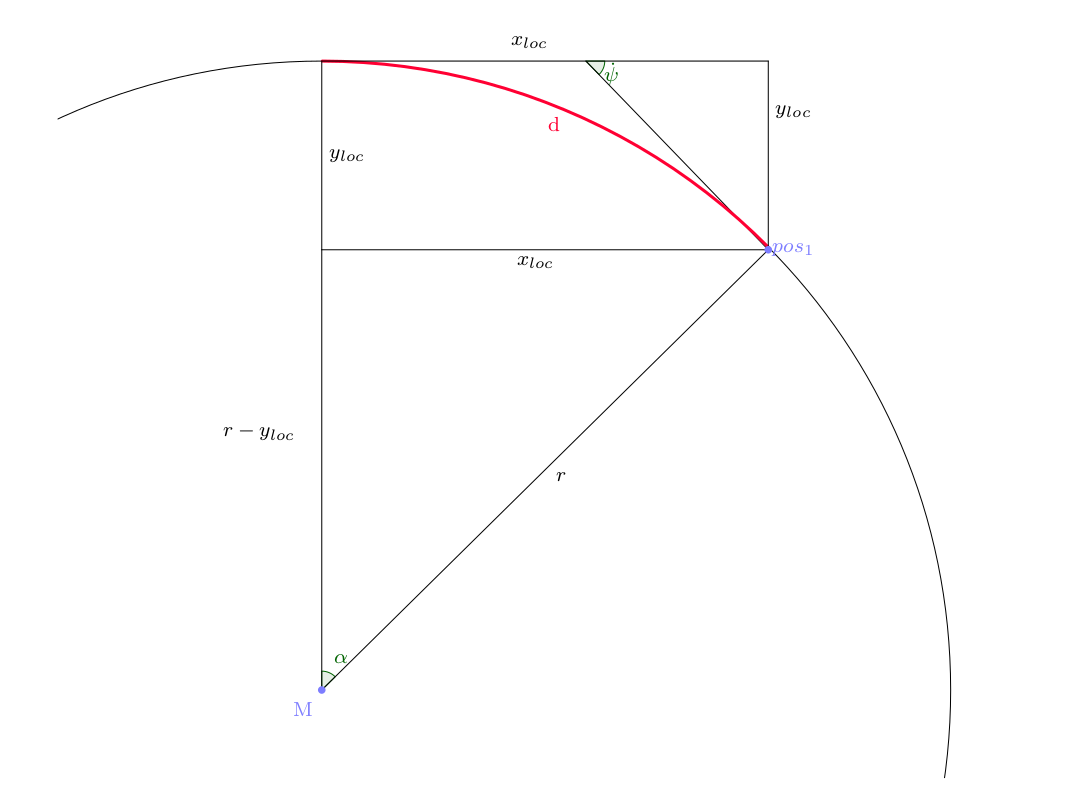
Fig. 2.4 This is the caption.¶
- Parameters:
sigma_points (npt.NDArray) – All sigma points around the current state vector.
dt (int) – Timestep since last predict.
u (npt.NDArray) – Current control input vector of the system.
- Returns:
New estimated state vector of the system
- Return type:
npt.NDArray
- property landmarks: ndarray[Any, dtype[ScalarType]]¶
Returns cartesian coordinates of all tracked landmarks.
- Returns:
Cartesian coordinates of all tracked landmarks.
- Return type:
npt.NDArray
- property landmarks_prior: ndarray[Any, dtype[ScalarType]]¶
Returns cartesian coordinates of all prior tracked landmarks.
- Returns:
Cartesian coordinates of all prior tracked landmarks.
- Return type:
npt.NDArray
- measurement_mean(sigmas: ndarray[Any, dtype[ScalarType]], Wm: ndarray[Any, dtype[ScalarType]]) ndarray[Any, dtype[ScalarType]][source]¶
Calculates the weighted mean of all sigma points of the measurement vectors of all sensors.
- Parameters:
sigmas (npt.NDArray) – Sigma points of the measurement vector of all sensors..
Wm (npt.NDArray) – Weights for the calculation of the weighted mean of the measurement.
- Returns:
Weighted mean of the sigma points of the measurement vectors of all sensors.
- Return type:
npt.NDArray
- predict(dt=None, UT=None, fx=None, **fx_args)[source]¶
Performs the predict step of the UKF. On return, self.x and self.P contain the predicted state (x) and covariance (P). ‘
Important: this MUST be called before update() is called for the first time.
- Parameters:
dt (double, optional) – If specified, the time step to be used for this prediction. self._dt is used if this is not provided.
fx (callable f(x, **fx_args), optional) – State transition function. If not provided, the default function passed in during construction will be used.
UT (function(sigmas, Wm, Wc, noise_cov), optional) – Optional function to compute the unscented transform for the sigma points passed through hx. Typically the default function will work - you can use x_mean_fn and z_mean_fn to alter the behavior of the unscented transform.
**fx_args (keyword arguments) – optional keyword arguments to be passed into f(x).
- static residual_sigmaf_and_x(sigmas_f: ndarray[Any, dtype[floating]], x: ndarray[Any, dtype[floating]]) ndarray[Any, dtype[floating]][source]¶
Calculate the difference the sigma points and the state vector.
As the state vector contains an angle, the result from the subtraction has to be normalized to the interval [-pi:pi].
- Parameters:
sigmas_f (npt.NDArray) – Sigma point.
x (npt.NDArray) – Current state vector.
- Returns:
Difference between sigma points and state vector.
- Return type:
npt.NDArray
- residual_sigmash_and_z(sigmas_h: ndarray[Any, dtype[ScalarType]], z: ndarray[Any, dtype[ScalarType]]) ndarray[Any, dtype[ScalarType]][source]¶
Calculates the difference between the measurement sigma points and the measurement for all sensors.
- Parameters:
sigmas_h (npt.NDArray) – Sigma points for all measurements.
z (npt.NDArray) – Measurements of all sensors.
- Returns:
Difference between sigma points and measurements of all sensors.
- Return type:
npt.NDArray
- run_batch(saver: Saver) None[source]¶
Run predict and update steps for the given control inputs and measurements.
Using the prerecorded measurements that have been passed during the initialization of the filter and sensors. If there are values for all control inputs and the time since the last predict step is bigger than the predict tolerance, a new prediction is made. Updates are done with the mean of the meausrements since the last prediction.
- Parameters:
saver (helpers.Saver) – Saver object to save the filter object at every timestep.
- sensor(sensor_name: str) Tuple[int, Sensor][source]¶
Return the index and the sensor object given the sensor name.
…
- static state_mean(sigmas: ndarray[Any, dtype[ScalarType]], Wm: ndarray[Any, dtype[ScalarType]]) ndarray[Any, dtype[ScalarType]][source]¶
Calculate the mean of the sigma points and weights.
The mean for the angle in the state vector has to be calculated seperately.
- Parameters:
sigmas (npt.NDArray) – Sigma Points used in the filter.
Wm (npt.NDArray) – Weights of the sigma points.
- Returns:
Mean of the sigma points.
- Return type:
npt.NDArray
- try_predict(dt: float, u: ndarray[Any, dtype[ScalarType]])[source]¶
Try to predict based on timestep and control input, correct state noise if there is a non-semi-positive-definite matrix and try again.
- Parameters:
dt (float) – Timestep since last predict.
u (npt.NDArray) – Control input.
- try_update(u: ndarray[Any, dtype[ScalarType]])[source]¶
Try to predict based on control input, correct state noise if there is a non-semi-positive-definite matrix and try again.
- Parameters:
u (npt.NDArray) – Control input.
- update(u: ndarray[Any, dtype[ScalarType]] | None = None)[source]¶
Update the UKF with the given measurements. On return, self.x and self.P contain the new mean and covariance of the filter.
- Parameters:
u (Optional[npt.NDArray]) – Current control input vector of the system.
- property x_R: ndarray[Any, dtype[ScalarType]]¶
Returns all physical state variables concerning the robot pose.
- Returns:
State vector of the robot pose. [x, y, v_x, psi].
- Return type:
npt.NDArray
- property x_R_post: ndarray[Any, dtype[ScalarType]]¶
Returns posterior of the state vector of the robot pose.
- Returns:
Post of the state vector of the robot pose.
- Return type:
npt.NDArray